
Robint y Robonauta: robótica y mapas
 Los proyectos ROBINT (Integración de comportamientos inteligentes en Robots Guía, DPI2004-07908-C02-02) y ROBONAUTA (Integración de modelos de conocimiento para la puesta en operación autónoma de un robot interactivo. DPI2007- 66846-C02-01) fueron continuación de dos proyectos anteriores: URBANO (Integración de Robots Autónomos en la Sociedad mediante el Uso de Nuevas Tecnologías, DPI2001-3652-C02) y WEBFAIR (Acceso Web a Ferias Comerciales Mediante Agentes Móviles, IST 29456). En estos proyectos, se desarrolló un robot guía para ferias y museos: Urbano.
Los proyectos ROBINT (Integración de comportamientos inteligentes en Robots Guía, DPI2004-07908-C02-02) y ROBONAUTA (Integración de modelos de conocimiento para la puesta en operación autónoma de un robot interactivo. DPI2007- 66846-C02-01) fueron continuación de dos proyectos anteriores: URBANO (Integración de Robots Autónomos en la Sociedad mediante el Uso de Nuevas Tecnologías, DPI2001-3652-C02) y WEBFAIR (Acceso Web a Ferias Comerciales Mediante Agentes Móviles, IST 29456). En estos proyectos, se desarrolló un robot guía para ferias y museos: Urbano.
Su objetivo es el modelado, desarrollo de una metodología de diseño y la implementación de comportamientos inteligentes en robots guía. Junto a DISAM, participaron en este proyecto el Grupo de Tecnología del Habla (GTH) de la UPM y la Ciudad de las Artes y de las Ciencias de Valencia.
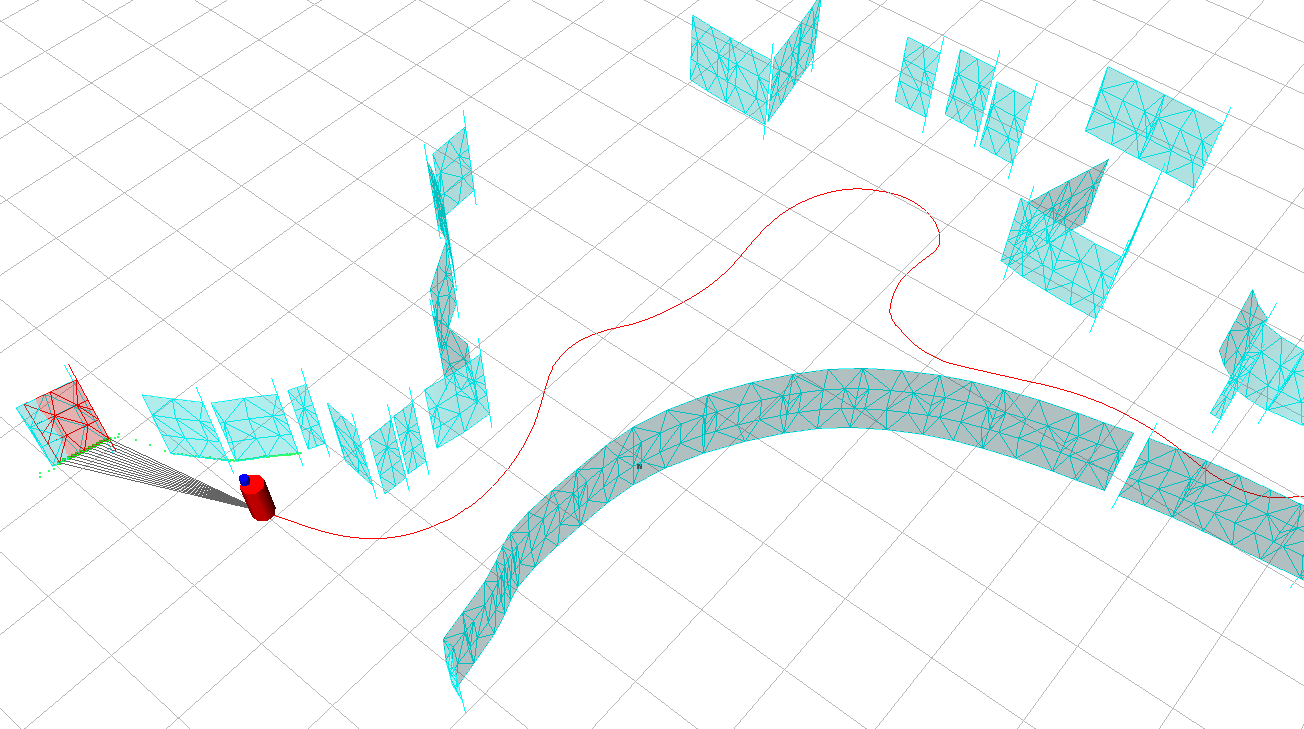
Mi contribución consistió en la mejora del sistema de modelado del entorno desarrollando nuevas técnicas de SLAM geométrico. El SLAM es un conjunto de técnicas que tratan de resolver el problema que supone para un móvil la obtención de un mapa del entorno que explora. Este no es un problema sencillo, debido fundamentalmente a limitaciones de los sensores de la propia máquina (imprecisiones, ruido…) y a las características del propio entorno que se desea modelar (presencia de objetos móviles, complejidad geométrica…) Estos trabajos se recogen en mi tesis doctoral (SLAM Geométrico con Modelado Basado en Curvas Spline), sobre la que puedes leer más aquí.
-

- interior del Museo de las Ciencias Príncipe Felipe
-
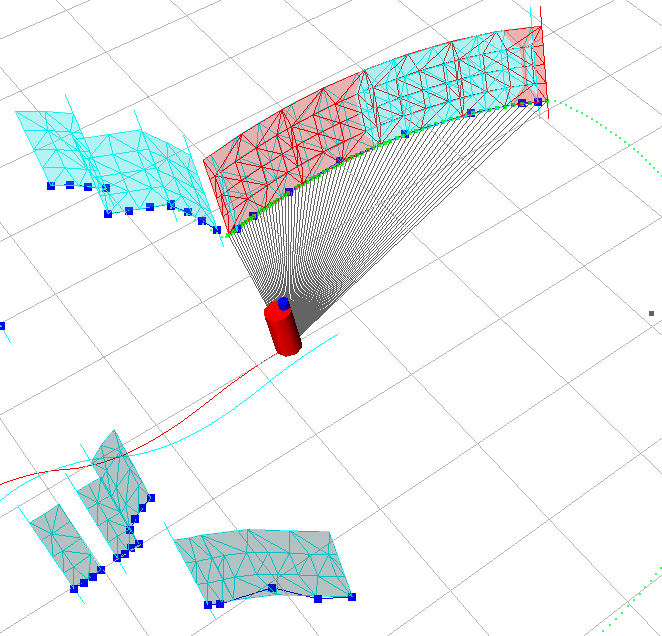
- proceso de exploración (I)
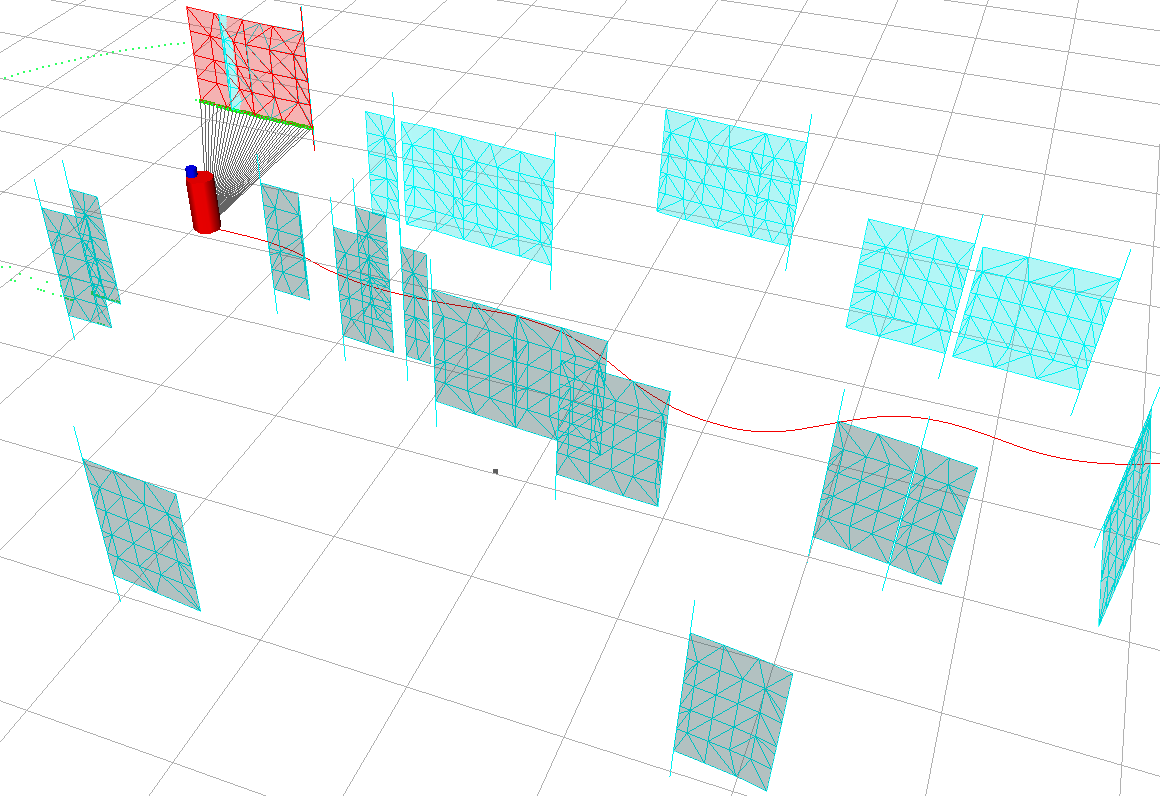
-
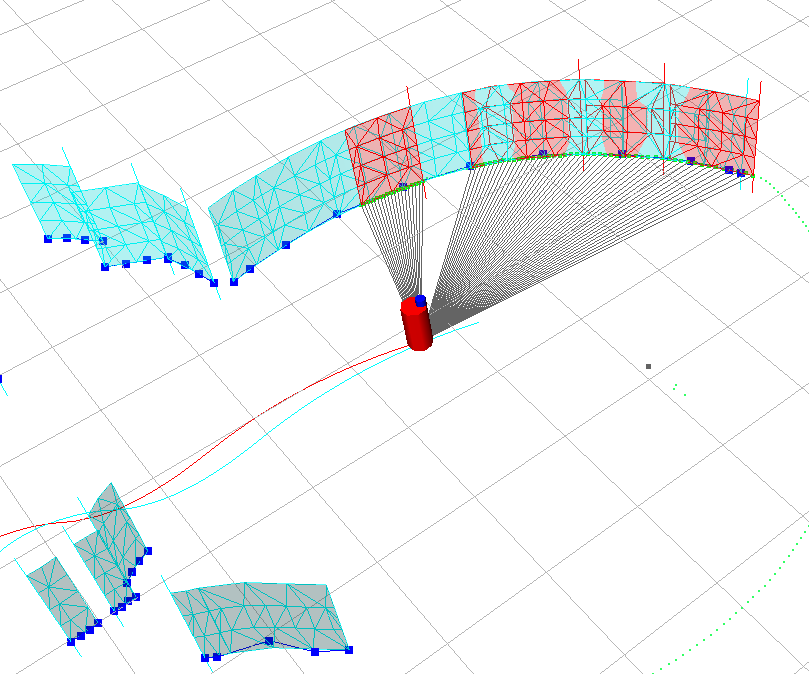
- proceso de exploración (II)
-
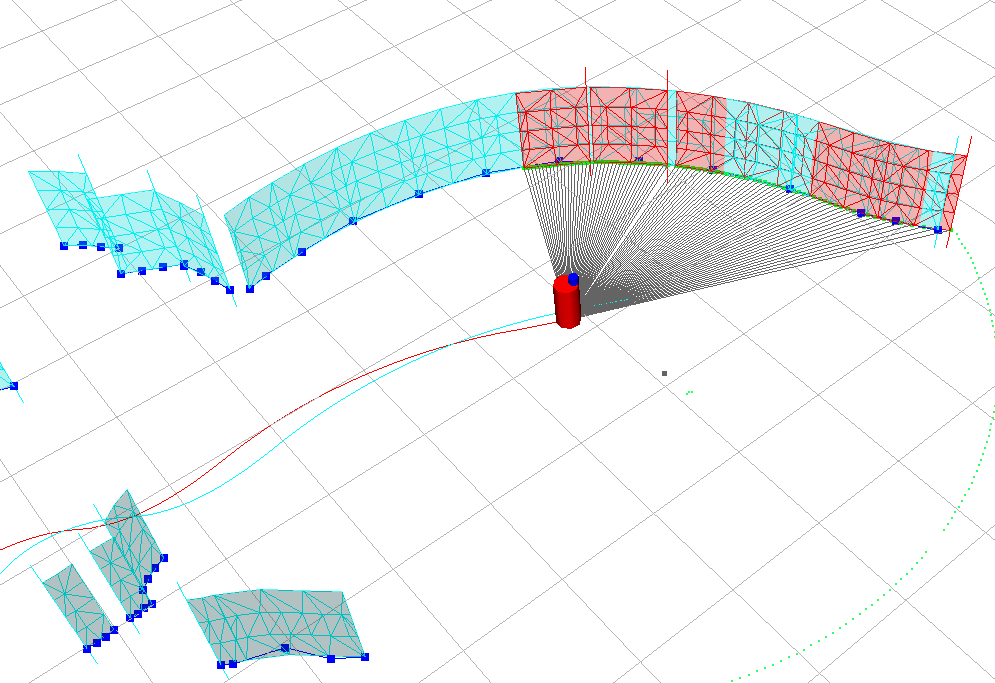
- proceso de exploración (III)
-
- detalle de una zona mapeada
-
- mapeado de paredes rectas
-
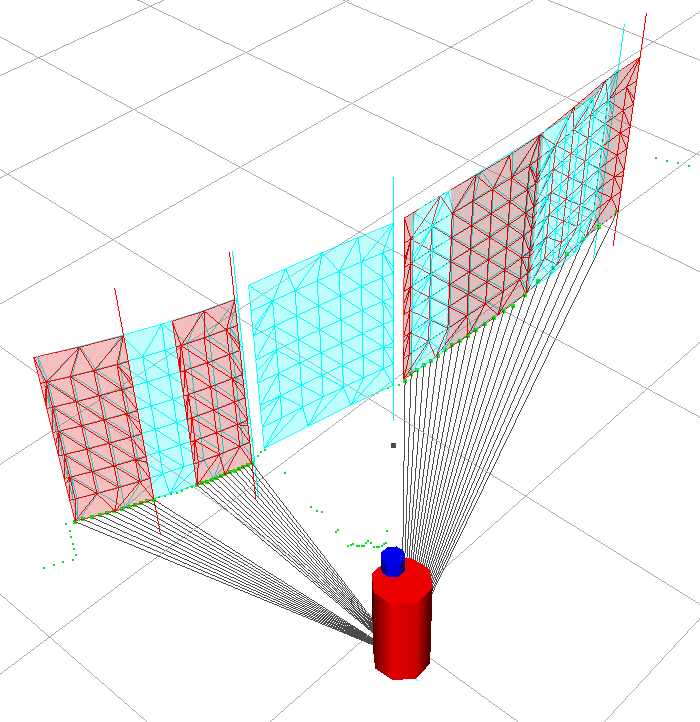
- segmentación de una pared compleja
Robicam: Diseño, Construcción y Control de un Robot Humanoide
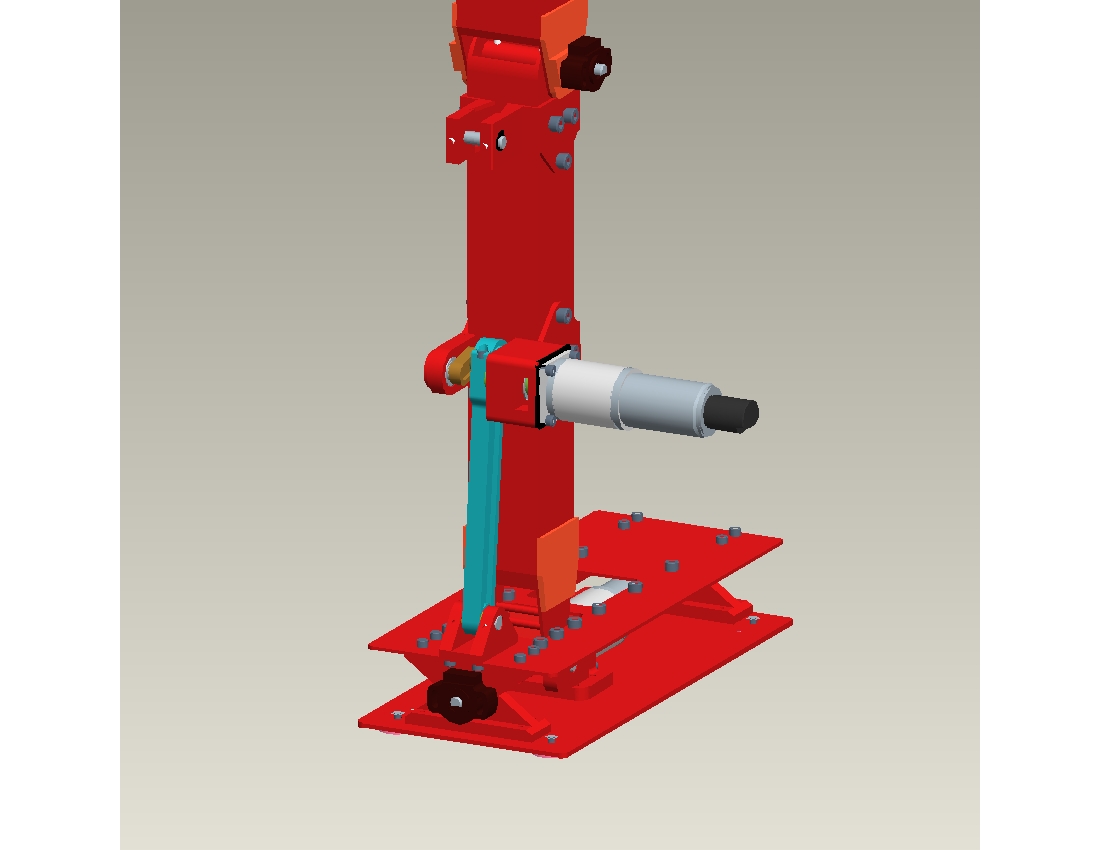
Los robots caminantes constituyen hoy en día una de las fronteras del estado del arte en robótica. En este proyecto se planteó la construcción de un robot bípedo que se materializó en el robot humanoide SILO2 del Instituto de Automática Industrial del CSIC, actualmente integrado en el CAR (Centro de Automática y Robótica) .
Se trata de un robot con 23 grados de libertad, 60 kg. de peso y 1.55 m de altura. El robot está dotado de accionamientos no lineales SMART en 6 de sus articulaciones.

Mis actividades dentro de este proyecto incluyeron:
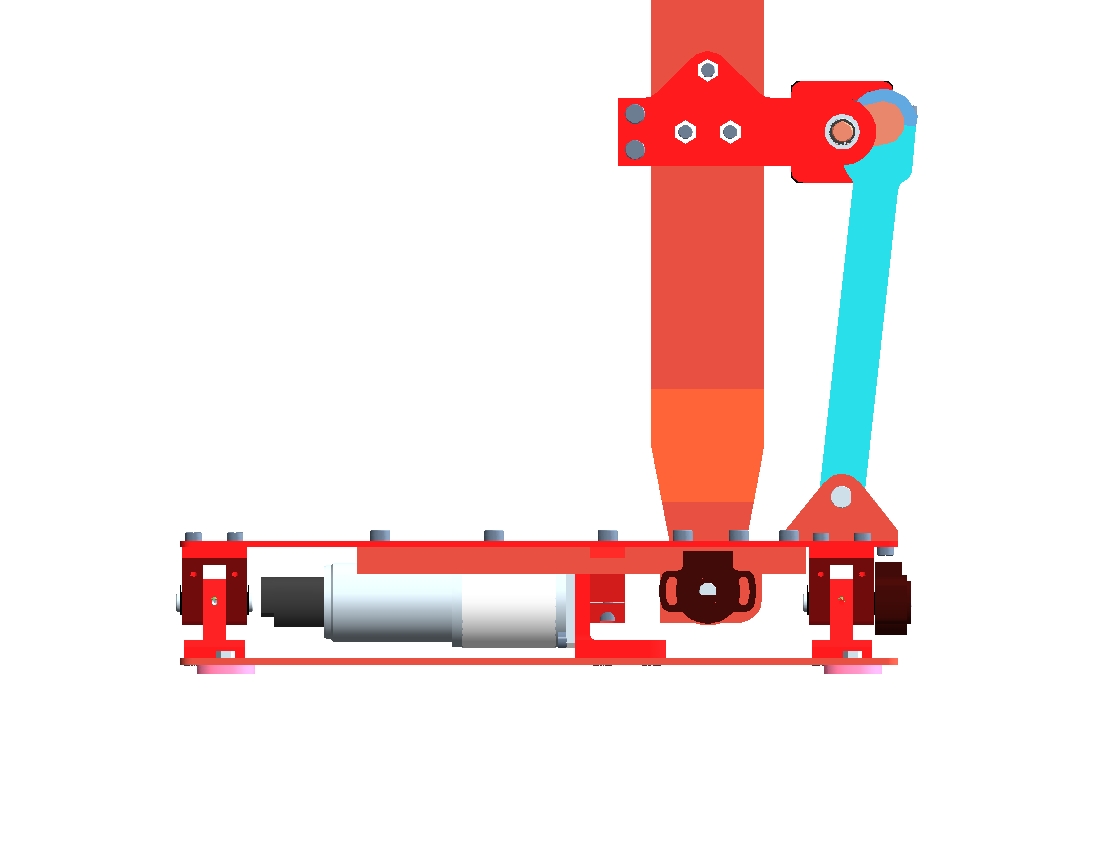
- Mejora del diseño mecánico de los accionamientos SMART en las articulaciones del tobillo y la rodilla en el plano sagital.
- Construcción de un sistema de adquisición de datos y monitorización en tiempo real bajo el sistema operativo QNX.
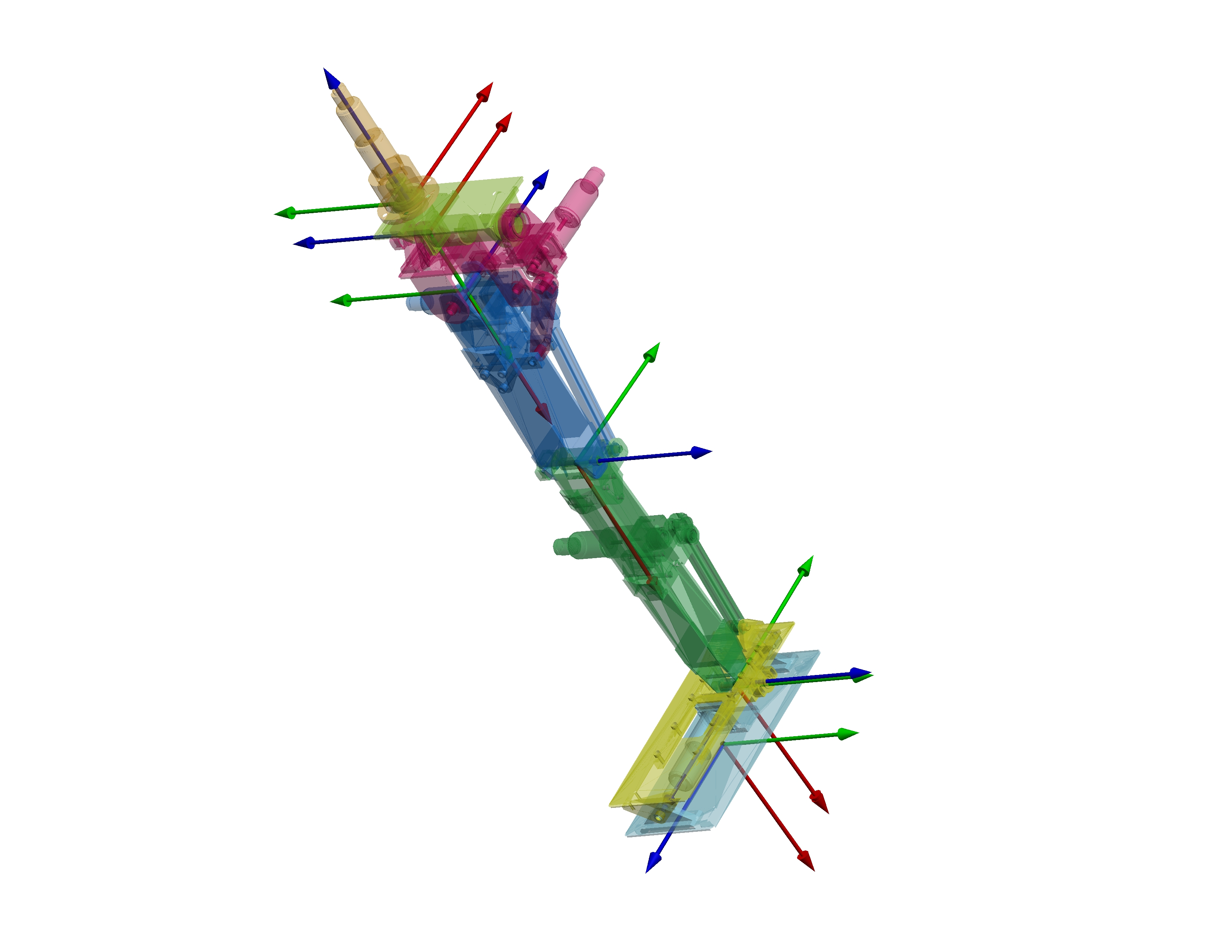
- Modelado cinemático de las piernas del robot.
- Diversas simulaciones utilizando la herramienta Pro/ENGINEER.

Goodlife: Global Optimisation of Disc Cutter Tool Life for Tunnel Boring Machine
El objetivo de este proyecto fue mejorar la metodología de excavación con máquinas tuneladoras en condiciones de suelo duro ó mixto, en los que se utilizan discos de corte en la cabeza de la máquina. Aquí puedes descargar un poster del proyecto. También están disponibles dos artículos (artículo1,artículo2).
Estas fueron mis actividades en el proyecto Goodlife:
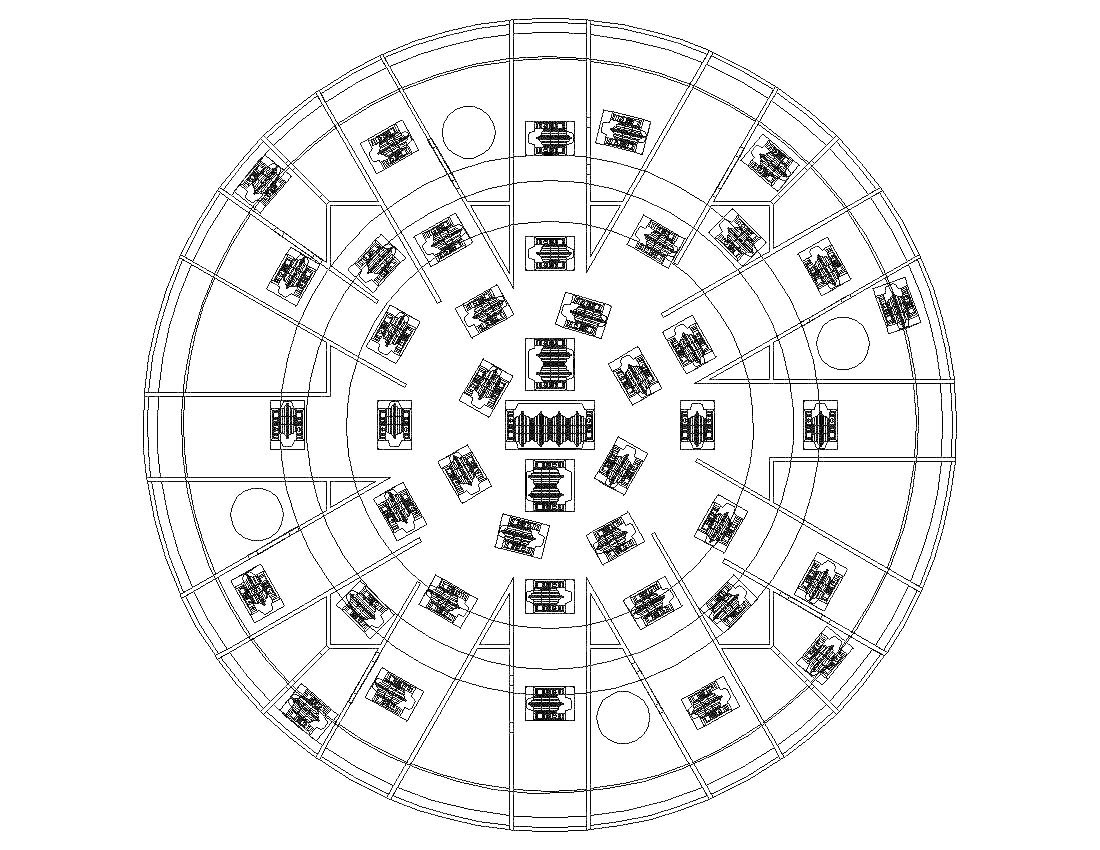
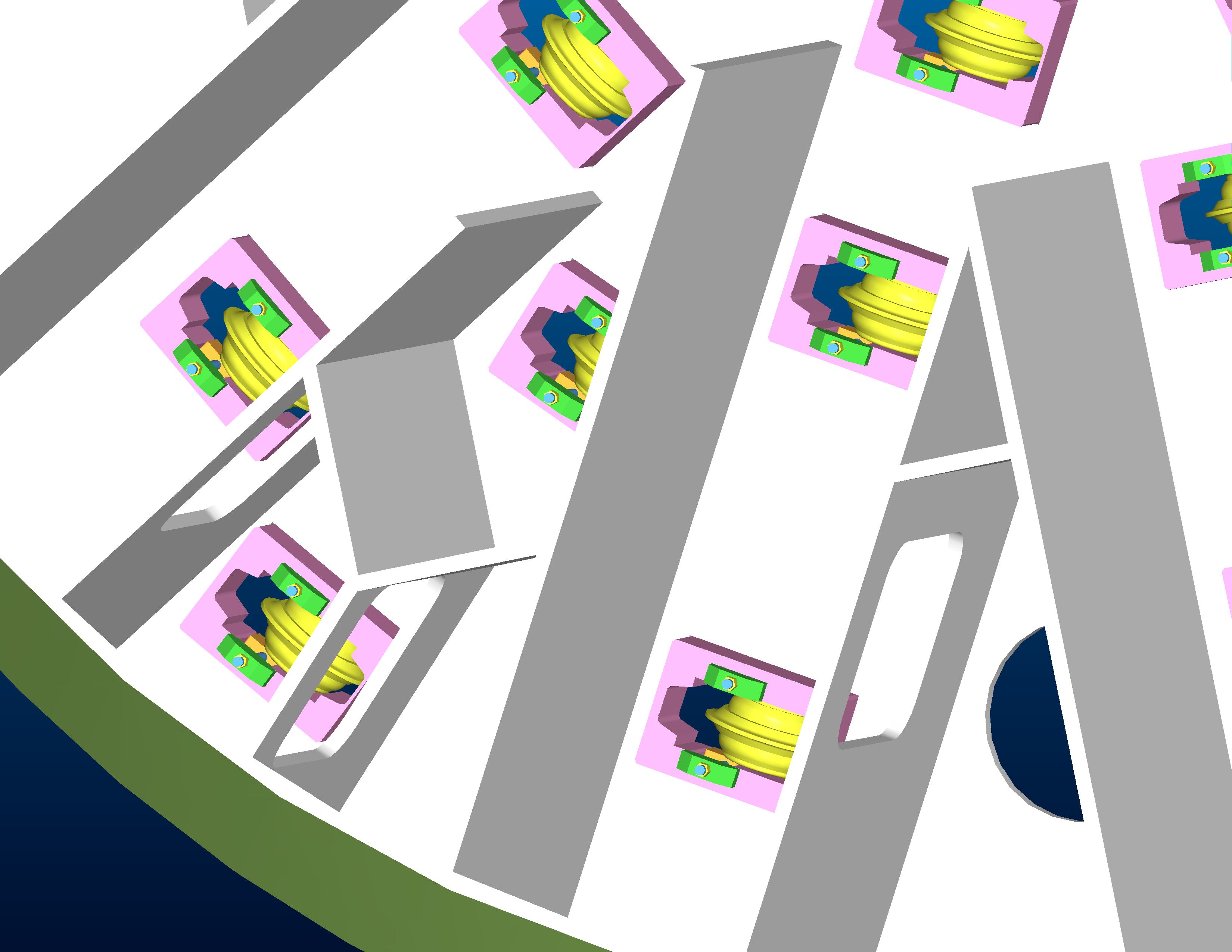
- Spacing: Estudio de accesibilidad en la cabeza de la tuneladora y mejoras en el proceso de reemplazo de los discos de corte.
- Sensorización y sistema software de adquisición de datos para banco de pruebas en las instalaciones de Palmieri (empresa italiana dedicada a la fabricación de discos de corte).
- Estudio de calentamiento y modelado térmico de los discos de corte.
- Herramientas software para trabajo con gráficas, generación de números aleatorios y simulación Montecarlo.

Deja una respuesta