
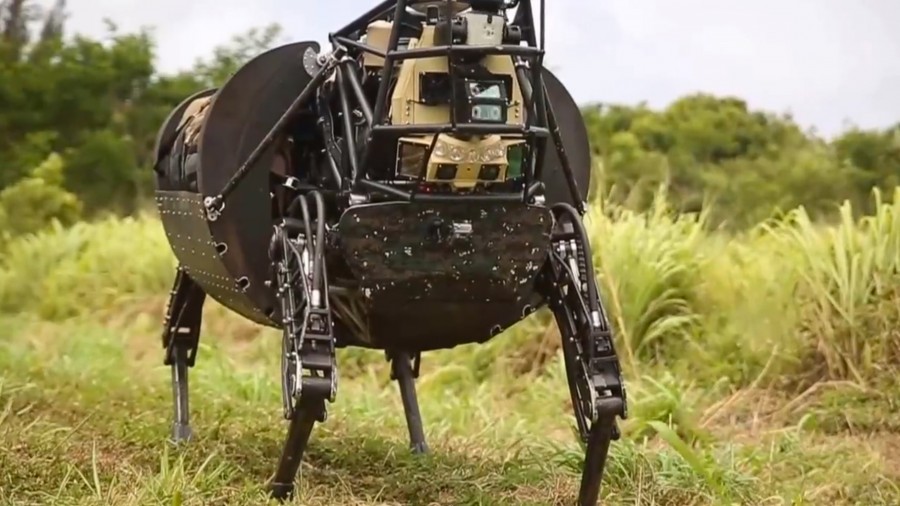
Se llama BigDog, no tiene cabeza y, por tanto, no puede ladrar. Nació en 2005 de la mano de Boston Dynamics, y a pesar de su juventud les da cien vueltas a otros animales de su especie: la especie robótica.
Categoría: Blog
Nuestro entorno tecnológico evoluciona a una velocidad de vértigo, y la manera en la que interactuamos con las máquinas también. En la universidad Carnegie Mellon (CMU), en Pittsbourgh (una de las mejores ciudades donde vivir en USA, aunque algunos discrepen), se proponen que utilicemos nuestro computador de una manera muy original: ‘tocando’ lo que vemos.
Ya hemos hablado aquí en alguna ocasión sobre los esfuerzos que están haciendo algunas compañías para revolucionar la manera en la que interactuamos con nuestros dispositivos electrónicos. Si para Apple el botón es ya un invento viejo, y desde Japón nos proponían utilizar nuestro cuerpo como medio de transmisión de datos, ahora es el profesor Ralph L. Hollis, del Instituto de Robótica de la CMU el que quiere que podamos tocar y sentir los objetos que vemos en pantalla.
Y no, no se trata de brujería. Se trata simplemente de una nueva aplicación de un fenómeno físico tan sencillo como es la fuerza de Lorentz. Dicha ley, establece a grandes rasgos que:
Cualquier carga eléctrica q desplazándose con velocidad v en el seno de un campo magnético B, experimenta una fuerza de sentido perpendicular al plano definido por los vectores v y B
Esta fuerza puede ser utilizada para hacer que objetos ‘leviten’ o parezcan suspendidos en el aire, y es el principio aprovechado por algunos nuevos trenes de alta velocidad que, literalmente, flotan sobre las vías. En esta página se puede encontrar un applet java que esquemáticamente muestra el efecto de esta curiosa fuerza magnética.
Pues bien, la gente de la CMU ha diseñado una especie de ratón futurista que consiste en una pieza semiesférica que flota sometida a levitación magnética. Agarrándola, es posible controlar objetos en la pantalla de un computador, como si de un ratón se tratara. Recíprocamente, colisiones detectadas en la pantalla pueden ser transmitidas al usuario, que siente el choque, el golpe, o el rozamiento a través de esta pieza que mantiene en su mano. Curioso, ¿no?.
Entre las aplicaciones evidentes se encuentra la micro cirugía de precisión, el diseño asistido por computador, la teleoperación de vehículos y sistemas robóticos, o la industria del videojuego. En esta página se puede encontrar más información sobre éste y otros proyectos de este grupo investigador. En gadget lab han tenido la oportunidad de echarle la zarpa al invento, y también nos lo cuentan aquí. Yo por mi parte aquí os dejo un vídeo donde se aprecian algunas de las posibilidades que el nuevo dispositivo puede ofrecen en un futuro no muy lejano…
Si mi abuela decía que la lavadora era la felicidad del hogar moderno, estoy seguro de que el robot doméstico será la felicidad del hogar del futuro. Sin embargo, aún les queda un largo trecho que recorrer a estos esclavos eléctricos antes de que su trabajo provoque verdadero gozo, y no una simple media sonrisa.
Un grupo de ingenieros de Silicon Valley se embarcaron hace unos 10 años en la tarea de crear un robot que fuese capaz de realizar por sí mismo algunas de las tareas más tediosas del mantenimiento del hogar: limpiar en la cocina. Fundaron el proyecto ReadyBot y, tras mucho esfuerzo y dedicación, el pasado mes de enero tuvieron listo su primer prototipo. Se compraron una cámara e hicieron una peli, y éste es el resultado:
Ya sé qué estáis pensando. Primero que se da un aire a R2-D2. Y segundo que, para lo que hace, ya os ventiláis vosotros el problema antes. Y es que es un poco triste. Estamos aún muy lejos de conseguir máquinas que de verdad resulten útiles en tareas cotidianas, tan sencillas aparentemente para nosotros. De poco sirve disponer de procesadores capaces de calcular miles de millones de operaciones por segundo cuando se trata de algo tan trivial como levantar una taza.
Hay que decir que ReadyBot es prácticamente un proyecto de aficionados. Se trata de un grupo de amiguetes que, sin ánimo de lucro (al menos de momento) se juntaron para construir un robot de limpieza doméstica. Ninguna empresa, universidad, o centro de investigación parece respaldar el proyecto. Como ellos mismos dicen en su web, están abiertos a recibir propuestas de inversores. Así que si tienes unos dineros ahorrados y planeas invertirlos, tal vez sea una buena oportunidad. Dentro de 15 o 20 años se puede abrir un huevo del que saldrá una gallina que pondrá otros… de oro.
Una de las cosas que llaman la atención de este prototipo es la extremada lentitud de sus movimientos. Ellos aducen que precisamente esa es una cualidad necesaria, ya que el robot ha de trabajar en un ambiente con presencia humana, y los movimientos lentos son un requisito de seguridad. Se contradicen cuando añaden que, de todas formas, el robot operaría en ausencia de los ocupantes de la vivienda, durante su horario de trabajo y que, por tanto, la velocidad no es un objetivo prioritario. Sin embargo uno de los campos de investigación más interesantes en la robótica actual está precisamente en mejorar la seguridad de estas máquinas sin sacrificar su precisión o velocidad. Aquí podéis ver un vídeo que muestra los avances conseguidos por los alemanes del DLR en este sentido.
Otra cosa a resaltar en este robot es que carece de los típicos sensores empleados por los robots móviles para localizarse. No existen ultrasonidos, ni infrarrojos ni, por supuesto, un láser que le permita tomar medidas de su entorno. Por lo tanto no es capaz de desplazarse de manera autónoma por el interior de una vivienda, y ha de ser teleoperado. Además las pinzas que le sirven de manos son, cuando menos, rudimentarias, y el tamaño del prototipo algo exagerado para las capacidades que en la práctica desarrolla (resulta inverosímil que el bicho salga del armario que aparece al comienzo del vídeo). Y lo más importante: que el robot este no plancha, vaya, que en el fondo es lo que a todos nos interesa.
Sin embargo, sus creadores han intentado mostrar con este prototipo que, manteniendo el coste en unos límites asequibles, sin emplear la tecnología más puntera o los materiales y componentes más sofisticados, se puede obtener un dispositivo que desempeñe razonablemente algunas tareas sencillas. Todo ello en ausencia de los ocupantes de la vivienda, y con todo el tiempo que sea preciso para limpiar unas migas de pan del mostrador de la cocina. De momento el resultado no impresiona a nadie, y aún queda mucho para que encontremos máquinas verdaderamente inteligentes que se parezcan a los sueños que a mediados del siglo pasado tenía gente como el magnífico ilustrador Boris Artzybasheff.
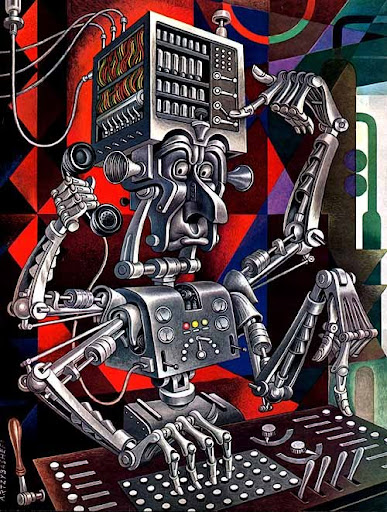
El ejecutivo del futuro. Boris Artzybasheff, 1952