
Me he quedado petrificado al ver este impresionante diseño en las páginas de Gizmodo; algo a lo que ellos llaman ‘un segway tuneado y peligroso’.
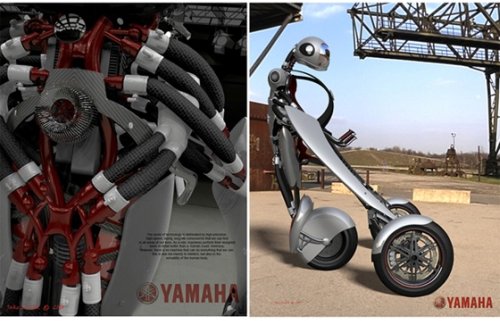
Se llama ‘Deus Ex Machina’ (DEM) y es el diseño de un estudiante de Pasadena (California) llamado Jake Loniak por el que ha recibido un premio de Yamaha. Yo no creo que se parezca realmente a un segway. Mientras que este último se asemeja a un monopatín de dos ruedas con equilibrado automático, el diseño de Jake me recuerda a una mezcla entre un exoesqueleto neumático y un triciclo. Mientras que el segway está pensado para realizar plácidos desplazamientos urbanos, el segundo parece un traje de Ironman con ruedas; y más le vale ser igual de resistente para proteger de un eventual piñazo a los 120 km/h que podría alcanzar el invento en caso de fabricarse.
Algunas cosas me han llamado la atención de este diseño:
- Contiene un total de 36 músculos artificiales. Los músculos artificiales son accionamientos neumáticos bastante populares en robótica. Son ligeros en comparación con los motores eléctricos, aunque su control es algo más complicado. Otra contrapartida es que precisan de un compresor que suministre el aire comprimido, y en general estos son bastante ruidosos.
- El casco parece estar ligado al resto de la estructura mediante músculos artificiales. No parece algo muy cómodo.
- La parte inferior del cuerpo (de la cadera para abajo) parece quedar suspendida en el aire mientras se conduce. Tampoco parece existir un soporte adecuado para los pies.
- No me queda claro cuál es el sistema de amortiguación que han pensado para el prototipo.
Se trata de un prototipo/idea/diseño y seguramente hay muchas cosas que poder mejorar. Pero no es probable que llegue a fabricarse, especialmente si pensamos en los problemas de seguridad que plantea. En cualquier caso es curioso de ver, y me ha servido como excusa para mencionar los músculos artificiales y enseñaros un par de robots.
Cuando he visto el DEM y sus músculos artificiales, he recordado instantáneamente al robot bípedo Shadow, que tanto me llamó la atención hace algunos años. Ya se abandonó este proyecto, pero la empresa ha seguido trabajando en una mano artificial que es bastante curiosa de ver. Sin embargo, aún existe algún proyecto empeñado en sacar el máximo partido de estos actuadores en el diseño de robots bípedos completos, como es el caso del robot belga LUCY (aquí pueden verse los ‘músculos’ que sirven a este robot para moverse).
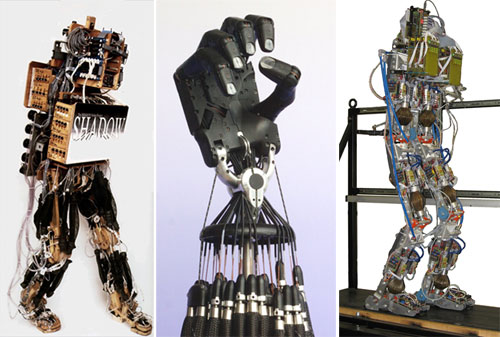
El robot bípedo Shadow (izquierda), la mano Shadow (centro) y el robot LUCY (derecha).
Para terminar aquí os dejo un vídeo de la mano robótica Shadow. Algunas de las acciones son bastante espectaculares. Pero aviso que la cosa tiene truco: muchas de las operaciones realizadas requieren de la intervención de un brazo. Pero el brazo no existe. ¿Quién mueve la mano? Pues seguramente Pedro o Alberto (Peter o Albert), aunque no deja de ser curioso lo que hacen esos deditos. En robótica, no siempre es oro todo lo que reluce 😉
Deja una respuesta